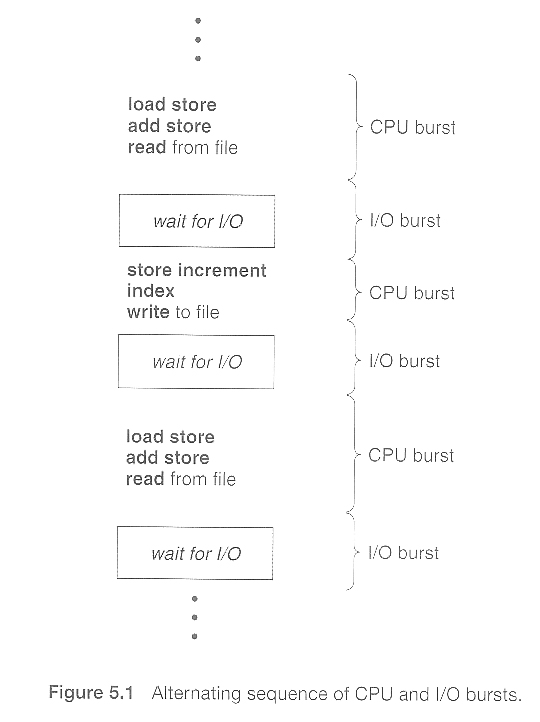
The following subsections will explain several common scheduling
strategies, looking at only a single CPU burst each for a small number
of processes. Obviously real systems have to deal with a lot more
simultaneous processes executing their CPU-I/O burst cycles.
5.3.1 First-Come First-Serve Scheduling, FCFS
- FCFS is very simple - Just a FIFO queue, like customers waiting in line at the bank or the post office or at a copying machine.
- Unfortunately, however, FCFS can yield some very long average
wait times, particularly if the first process to get there takes a long
time. For example, consider the following three processes:
| Process |
Burst Time |
P1 |
24 |
P2 |
3 |
P3 |
3 |
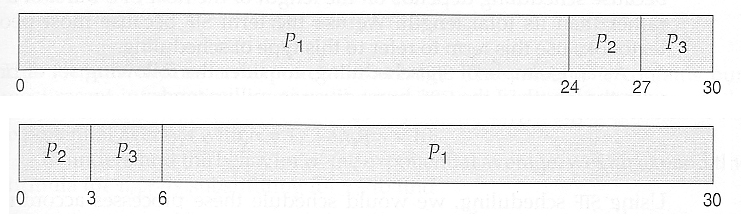
- In the first Gantt chart below, process P1 arrives first. The
average waiting time for the three processes is ( 0 + 24 + 27 ) / 3 =
17.0 ms.
- In the second Gantt chart below, the same three processes have
an average wait time of ( 0 + 3 + 6 ) / 3 = 3.0 ms. The total run time
for the three bursts is the same, but in the second case two of the
three finish much quicker, and the other process is only delayed by a
short amount.
- FCFS can also block the system in a busy dynamic system in another way, known as the convoy effect.
When one CPU intensive process blocks the CPU, a number of I/O
intensive processes can get backed up behind it, leaving the I/O devices
idle. When the CPU hog finally relinquishes the CPU, then the I/O
processes pass through the CPU quickly, leaving the CPU idle while
everyone queues up for I/O, and then the cycle repeats itself when the
CPU intensive process gets back to the ready queue.
5.3.2 Shortest-Job-First Scheduling, SJF
- The idea behind the SJF algorithm is to pick the quickest
fastest little job that needs to be done, get it out of the way first,
and then pick the next smallest fastest job to do next.
- ( Technically this algorithm picks a process based on the next shortest CPU burst, not the overall process time. )
- For example, the Gantt chart below is based upon the following
CPU burst times, ( and the assumption that all jobs arrive at the
same time. )
| Process |
Burst Time |
P1 |
6 |
P2 |
8 |
P3 |
7 |
P4 |
3 |

- In the case above the average wait time is ( 0 + 3 + 9 + 16 ) / 4
= 7.0 ms, ( as opposed to 10.25 ms for FCFS for the same processes. )
- SJF can be proven to be the fastest scheduling algorithm, but it
suffers from one important problem: How do you know how long the next
CPU burst is going to be?
- For long-term batch jobs this can be done based upon the
limits that users set for their jobs when they submit them, which
encourages them to set low limits, but risks their having to re-submit
the job if they set the limit too low. However that does not work for
short-term CPU scheduling on an interactive system.
- Another option would be to statistically measure the run
time characteristics of jobs, particularly if the same tasks are run
repeatedly and predictably. But once again that really isn't a viable
option for short term CPU scheduling in the real world.
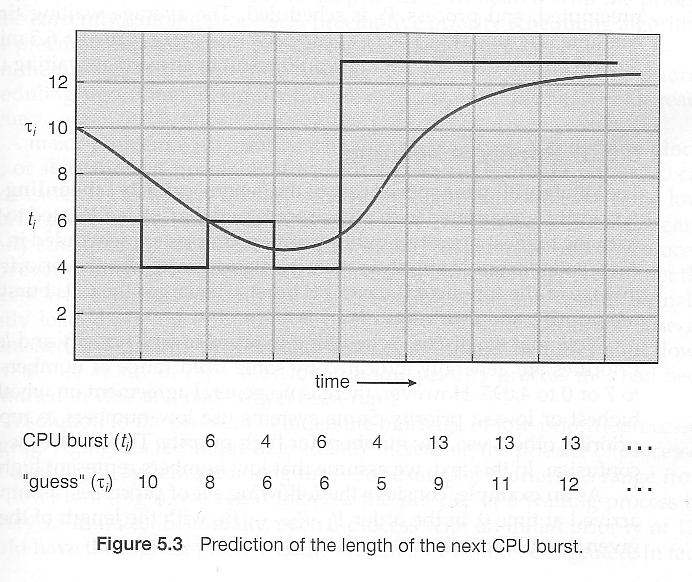
- A more practical approach is to predict
the length of the next burst, based on some historical measurement of
recent burst times for this process. One simple, fast, and relatively
accurate method is the exponential average,
which can be defined as follows. ( The book uses tau and t for their
variables, but those are hard to distinguish from one another and don't
work well in HTML. )
estimate[ i + 1 ] = alpha * burst[ i ] + ( 1.0 - alpha ) * estimate[ i ]
- In this scheme the previous estimate contains the history of
all previous times, and alpha serves as a weighting factor for the
relative importance of recent data versus past history. If alpha is 1.0,
then past history is ignored, and we assume the next burst will be the
same length as the last burst. If alpha is 0.0, then all measured burst
times are ignored, and we just assume a constant burst time. Most
commonly alpha is set at 0.5, as illustrated in Figure 5.3:
- SJF can be either preemptive or non-preemptive. Preemption
occurs when a new process arrives in the ready queue that has a
predicted burst time shorter than the time remaining in the process
whose burst is currently on the CPU. Preemptive SJF is sometimes
referred to as shortest remaining time first scheduling.
- For example, the following Gantt chart is based upon the following data:
| Process |
Arrival Time |
Burst Time |
P1 |
0 |
8 |
P2 |
1 |
4 |
P3 |
2 |
9 |
p4 |
3 |
5 |

- The average wait time in this case is ( ( 5 - 3 ) + ( 10 - 1 ) +
( 17 - 2 ) ) / 4 = 26 / 4 = 6.5 ms. ( As opposed to 7.75 ms for
non-preemptive SJF or 8.75 for FCFS. )
5.3.3 Priority Scheduling
- Priority scheduling is a more general case of SJF, in which each
job is assigned a priority and the job with the highest priority gets
scheduled first. ( SJF uses the inverse of the next expected burst
time as its priority - The smaller the expected burst, the higher the
priority. )
- Note that in practice, priorities are implemented using integers
within a fixed range, but there is no agreed-upon convention as to
whether "high" priorities use large numbers or small numbers. This book
uses low number for high priorities, with 0 being the highest possible
priority.
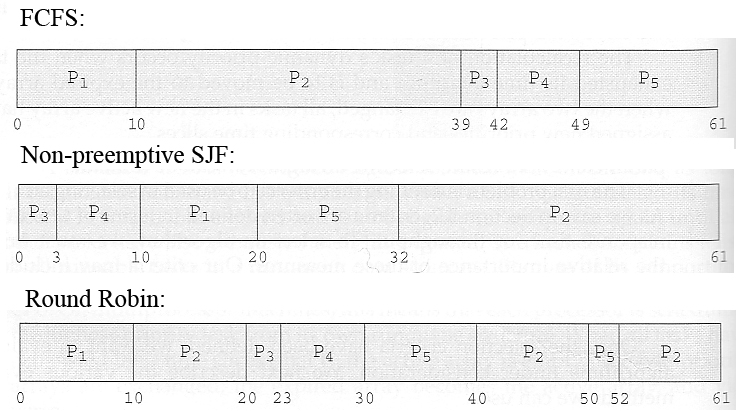
- For example, the following Gantt chart is based upon these
process burst times and priorities, and yields an average waiting time
of 8.2 ms:
| Process |
Burst Time |
Priority |
P1 |
10 |
3 |
P2 |
1 |
1 |
P3 |
2 |
4 |
P4 |
1 |
5 |
P5 |
5 |
2 |

- Priorities can be assigned either internally or externally.
Internal priorities are assigned by the OS using criteria such as
average burst time, ratio of CPU to I/O activity, system resource use,
and other factors available to the kernel. External priorities are
assigned by users, based on the importance of the job, fees paid,
politics, etc.
- Priority scheduling can be either preemptive or non-preemptive.
- Priority scheduling can suffer from a major problem known as indefinite blocking, or starvation, in which a low-priority task can wait forever because there are always some other jobs around that have higher priority.
- If this problem is allowed to occur, then processes will
either run eventually when the system load lightens ( at say 2:00 a.m.
), or will eventually get lost when the system is shut down or crashes.
( There are rumors of jobs that have been stuck for years. )
- One common solution to this problem is aging,
in which priorities of jobs increase the longer they wait. Under this
scheme a low-priority job will eventually get its priority raised high
enough that it gets run.
5.3.4 Round Robin Scheduling
- Round robin scheduling is similar to FCFS scheduling, except that CPU bursts are assigned with limits called time quantum.
- When a process is given the CPU, a timer is set for whatever value has been set for a time quantum.
- If the process finishes its burst before the time quantum
timer expires, then it is swapped out of the CPU just like the normal
FCFS algorithm.
- If the timer goes off first, then the process is swapped out of the CPU and moved to the back end of the ready queue.
- The ready queue is maintained as a circular queue, so when all
processes have had a turn, then the scheduler gives the first process
another turn, and so on.
- RR scheduling can give the effect of all processors sharing the
CPU equally, although the average wait time can be longer than with
other scheduling algorithms. In the following example the average wait
time is 5.66 ms.
| Process |
Burst Time |
P1 |
24 |
P2 |
3 |
P3 |
3 |

- The performance of RR is sensitive to the time quantum selected.
If the quantum is large enough, then RR reduces to the FCFS algorithm;
If it is very small, then each process gets 1/nth of the processor time
and share the CPU equally.
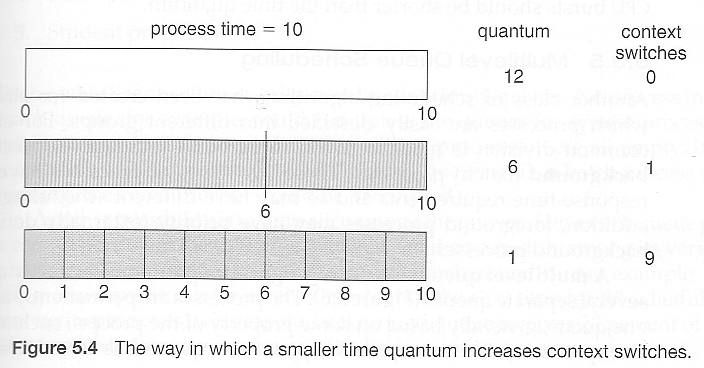
- BUT, a real system invokes overhead for every
context switch, and the smaller the time quantum the more context
switches there are. ( See Figure 5.4 below. ) Most modern systems use
time quantum between 10 and 100 milliseconds, and context switch times
on the order of 10 microseconds, so the overhead is small relative to
the time quantum.
- Turn around time also varies with quantum time, in a
non-apparent manner. Consider, for example the processes shown in Figure
5.5:
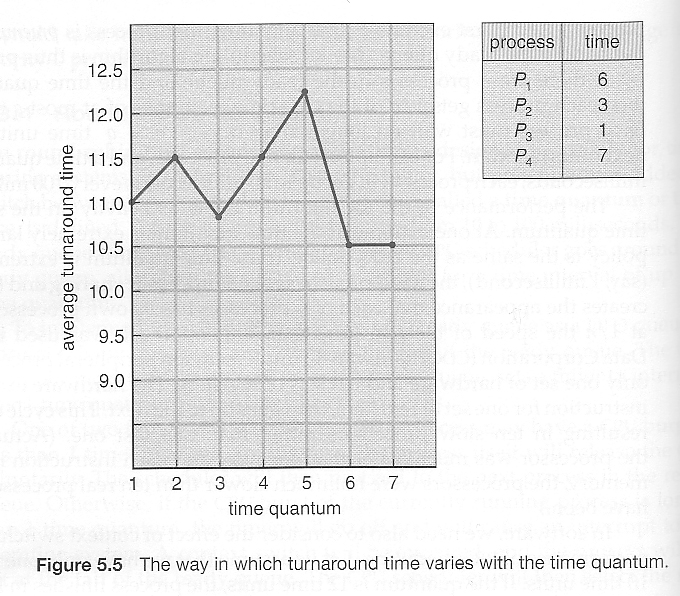
- In general, turnaround time is minimized if most processes
finish their next cpu burst within one time quantum. For example, with
three processes of 10 ms bursts each, the average turnaround time for 1
ms quantum is 29, and for 10 ms quantum it reduces to 20. However, if it
is made too large, then RR just degenerates to FCFS. A rule of thumb is
that 80% of CPU bursts should be smaller than the time quantum.
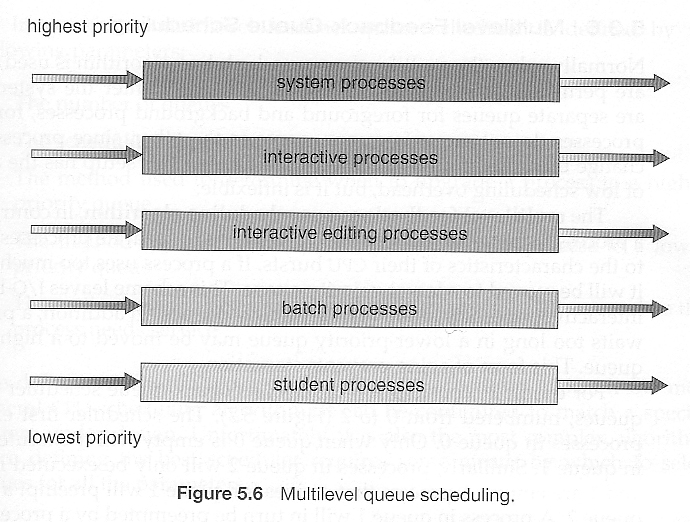
5.3.5 Multilevel Queue Scheduling
- When processes can be readily categorized, then multiple
separate queues can be established, each implementing whatever
scheduling algorithm is most appropriate for that type of job, and/or
with different parametric adjustments.
- Scheduling must also be done between queues, that is scheduling
one queue to get time relative to other queues. Two common options are
strict priority ( no job in a lower priority queue runs until all higher
priority queues are empty ) and round-robin ( each queue gets a time
slice in turn, possibly of different sizes. )
- Note that under this algorithm jobs cannot switch from queue to
queue - Once they are assigned a queue, that is their queue until they
finish.
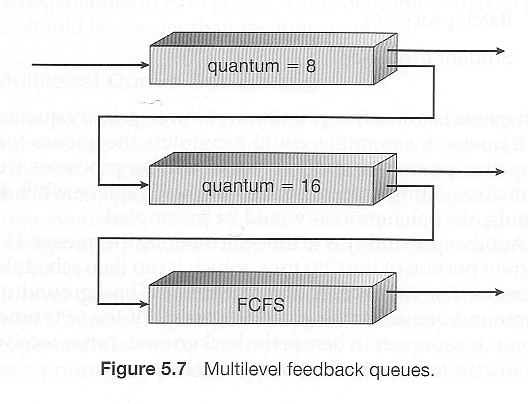
5.3.6 Multilevel Feedback-Queue Scheduling
- Multilevel feedback queue scheduling is similar to the ordinary
multilevel queue scheduling described above, except jobs may be moved
from one queue to another for a variety of reasons:
- If the characteristics of a job change between CPU-intensive
and I/O intensive, then it may be appropriate to switch a job from one
queue to another.
- Aging can also be incorporated, so that a job that has
waited for a long time can get bumped up into a higher priority queue
for a while.
- Multilevel feedback queue scheduling is the most flexible,
because it can be tuned for any situation. But it is also the most
complex to implement because of all the adjustable parameters. Some of
the parameters which define one of these systems include:
- The number of queues.
- The scheduling algorithm for each queue.
- The methods used to upgrade or demote processes from one queue to another. ( Which may be different. )
- The method used to determine which queue a process enters initially.